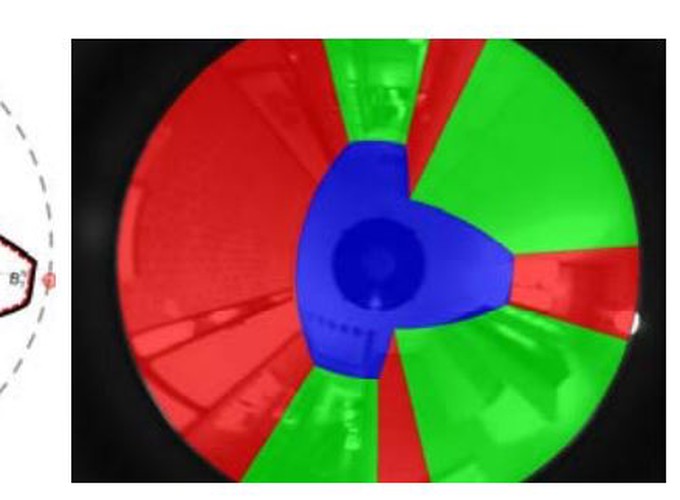
In this work, we study the problem of recovering the spatial layout of a scene from a collection of lines extracted from a single indoor image. Equivalent methods for conventional cameras have been proposed in the literature, but not much work has been done about this topic using omnidirectional vision, particulary powerful to obtain the spatial layout due to its wide field of view. As the geometry of omnidirectional and conventional images is different, most of the proposed methods for standard cameras do not work and new algorithms with specific considerations are required. We first propose a new method for vanishing points (VPs) estimation and line classification for omnidirectional images. Our main contribution is a new approach for spatial layout recovery based on these extracted lines and vanishing points, combined with a set of geometrical constraints, which allow us to detect floor-wall boundaries regardless of the number of walls. In our proposal, we first make a 4 walls room hypothesis and subsequently we expand this room in order to find the best fitting. We demonstrate how we can find the floor-wall boundary of the interior of a building, even when this boundary is partially occluded by objects and show several examples of these interpretations.
Supplementary notes can be added here, including code and math.